CableBOT- Parallel Cable Robotics for Improving Maintenance and Logistics of Large-Scale Products
The main objective of CableBOTproject is the development of a new generation of modular and reconfigurable robotic devices that are capable to perform many different steps in the life-cycle stages of large-scale structures.
The CableBOT project deals with a novel methodology for designing, developing and evaluating cable robots customised for the automation in large-scale auxiliary processes. Parallel cable robots extend the payloads and workspace of conventional industrial robots by more than two orders of magnitude.
Three key technologies will be developed to enable the vision:
- · Design of Cable Robot: Software tools to design the layout and geometry of cable robots. The ad-hoc connection of groups of winches to different end-effectors creates different setups for cable robots in order to achieve flexibility and reconfigurability.
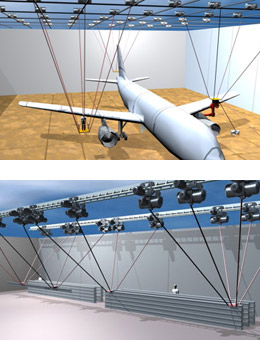
- · Industrial Process Planning: Simulation of cable robots to verify the operation of cable robots in environments with large-scale structures.
- · Control Algorithms and Systems: Distributed control and kinematic transformation to operate modular cable robots such as grids of cable robots under industrial requirements.
The combination of these technologies in an integrated robotic system results in a versatile system. CableBOT will demonstrate the potential of such automated systems for life-cycle maintenance and repairing of aircrafts and to introduce automation in life-cycle applications in the construction industry such as handling of beams.
Within CableBOT two fields of application are targeted in close cooperation to industry: Aircraft life-cycle maintenance in the aerospace industry and the construction beamspost-production handling. Both applications are characterized by the fact that the state-of-the-art automation can hardly be used due to manoeuvrability of heavy and large structures and risks associated. The results are feasible for many other fields including large-workspace movements of products, with impact in logistics, transport, and warehousing.
MAIN PROJECT DATA
START NOVEMBER 2011
DURATION 36 MONTHS
TOTAL BUDGET € 4,44M
The project has received funding from the European Union Seventh Framework Programme (FP7/2007-2013) under grant agreement n° 285404.
EU Funding: € 3M (67%)
COORDINADOR Mariola Rodríguez (TECNALIA)