FRAUNHOFER-IPA
The Fraunhofer-Gesellschaft undertakes applied research of direct utility to private and public enterprise and of wide benefit to society. Its services are solicited by customers and contractual partners in industry, the service sector and public administration. The Fraunhofer-Gesellschaft maintains 58 Institutes, at over 40 different locations throughout Germany. A staff of some 12,500, predominantly qualified scientists and engineers, works with an annual research budget of over one billion euros.
Fraunhofer IPA develops solutions for organisational and technological functions in the production sector of industrial companies form the main areas of research and development work. The institute also addresses issues resulting from developments and changes in the service sector. The activities conducted by the Robotic Systems department encompass all the subject areas connected with robot deployment and automatable production processes, as well as the development of robotic systems and their key components. A wide range of development tools, laboratories and testing facilities are available for development projects, trials and demonstrations. IPA has been a forerunner in service robotics in Germany both with respect to market studies, system and component developments and showcasing cutting edge technology in this field.
Fraunhofer IPA has a strong background in the integration of complex robotic systems, both in the field of industrial and service robotics. IPA initiated and leads the European flagship project SMErobotTM and is involved in a couple of other leading robotic activities such as BRICS and PiSA on European level as well as on national level (MORPHA, ImRoNet, DESIRE).
The department "robot systems" at Fraunhofer IPA has been working on robotic system integration and robot control since more than two decades. The following developments are related to the CableBot project:
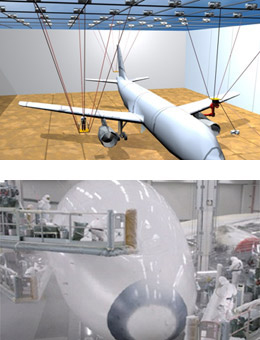
· Development of the parallel cable robot IPAnema with six-degrees-of-freedom. The control system was adopted from an industrial machine tool controller architecture
· Development of a planar parallel cable robot with three degrees-of-freedom
· Adaption of an industrial real-time NC-controller to command a light-weight robot arm and integration of the robot on an autonomous mobile platform
· Development of the ISELLA 2 arm, a serial cable-driven light-weight robot arm with four degrees-of-freedom
Development of the SkyWash system, a large-scale serial manipulator for airplane cleaning with a workspace of more than 10 meter[+] info: http://www.ipa.fraunhofer.de